Em 26 de abril a equipe de Mergulho de Segurança Pública MSP do Comando de Operações Especiais (COE) da Polícia Militar do Estado de São Paulo, participou de um treinamento com a tecnologia de sonar de varredura lateral com os especialistas do Instituto de Oceanografia da USP (Universidade de São Paulo), com a parte acadêmica na própria Universidade e um treinamento prático com simulado na Represa de Guarapiranga.
A equipe de mergulho do COE é formada por policiais com formação no Curso de Operações Especiais, com especialização mínima em Public Safety Diver, Contaminated Water Diver, Surface supplied Diver e Hull Search Diver, mas também com especialistas em mergulho técnico, cavernas, mergulho comercial etc, inclusive, com instrutores nas especialidades.
Uma das principais funções do time de mergulho é o apoio à Polícia Federal em varreduras de cascos de navios para localização de drogas. Nos últimos meses o COE localizou quatro grandes cargas da droga em navios no Porto de Santos e São Sebastião, somando quase uma tonelada de cocaína com altíssimo grau de pureza.
Pensando nessas demandas o COE está adquirindo um ROV (Romotely Operated Vehicle), um drone subaquático com várias tecnologias integradas, entre elas um sonar multibeam, que poderá “ver” em qualquer tipo de visibilidade ou qualidade de água.
A tecnologia de sonares evoluiu muito nos últimos anos, da mesma forma que não existe comparação entre um aparelho de celular de 15 anos atrás para o atual, também, não podemos comparar as tecnologias e aparelhos mais antigos com as modernas.
Uma grande dificuldade para o PSD brasileiro é entender e testar esse tipo de tecnologia, pois existem poucos aparelhos de ponta no Brasil, e a grande maioria desses não é projetado para as demandas de PSD, como localização de cadáveres, armas, veículos e objetos de crime submersos, e sim para o mapeamento subaquático e estudos geológicos, fazendo varreduras em enormes áreas, mas com pouca resolução, o que difere muito do PSD, que precisa identificar um pequeno objeto em uma área não muito extensa.
Meu primeiro contato com sonares foi nos Estados Unidos, durante um curso de mergulho policial na Geórgia. Por lá, o Federal Emergency Management Agency (FEMA), um órgão federal que cria standards e escalona os times de segurança pública pelo seu potencial de atuação e equipamentos, classifica no NIMS 508 os times de PSD em 4 grupos, sendo que os grupos 1 e 2 torna-se obrigatório que possuam sonares side scan, pela grande utilidade e importância operacional desse equipamento, diminuindo o tempo de buscas e expondo menos os mergulhadores em ambientes de risco.
Os sonares utilizam o som, ao invés da luz, para “verem” através o ambiente. Os primeiros sonares eram os analógicos, surgindo pelos anos 30 e 40, que emitiam um sinal de som, que viajava através do líquido, refletiam em um objeto e retornava ao equipamento, essa distância era calculada pelo tempo em que o som demorava para ir e voltar, visto que a velocidade do som é constante na água, (água destilada -1498m/s e água do mar 1531m/s).
Nos anos 80 e 90 tivemos o aparecimento do sonar digital, que consegue identificar, além da distância, informações como a composição do objeto, o quanto ele era denso. Assim como os golfinhos, os sonares digitais conseguiam identificar quanto do som era absorvido e refletido pelo objeto, fornecendo informações valiosas da composição do objeto. Na tela do sonar, os objetos que refletiam mais o som tinham uma aparência mais brilhante, em contraste com os que absorviam o som.
A tecnologia Compressed High Intensity Radar Pulse (CHIRP) surgiu no fim dos anos 90, sendo comercializada a partir de 2005. Essa tecnologia ao invés de emitir sons múltiplos e sequenciais na mesma frequência, emitia sons em frequências diferentes, de maneira que se perdemos o valor de retorno de um pulso, teremos os valores dos outros, não sendo mais necessário aguardarmos o retorno do primeiro som, pois os sequenciais eram em frequências diferentes, não atrapalhando a leitura dos retornos pelo equipamento.
Existem diferentes tipos de sonares, para diferentes aplicações. O MSP deve ter conhecimento do funcionamento dessa tecnologia, bem como dos tipos de aparelhos, para poder escolher a melhor ferramenta para a sua necessidade.
Side Scan
É um modelo de Sonar onde os transdutores que emitem os sinais são dispostos na lateral do aparelho, dessa maneira ele cria duas imagens na tela do computador, uma de bombordo e outra de boreste.
Há dois tipos de side scan, um é o hull monted, que é fixo ao casco de uma embarcação, e o outro é o Towed, onde o equipamento parece um pequeno torpedo, que é rebocado por uma embarcação.
O Towed side scan é um equipamento mais profissional, pois esse pode ser rebocado em diferentes profundidades, permitindo uma imagem com maior qualidade, de acordo com o tamanho do objeto e profundidade em que ele se encontra.
Sector Scanning Sonar
Que pode ser montado em um tripé no fundo, ou fixado em embarcações, objetos ou mesmo ROVs.
Ele dá uma visão de 360° do local de onde o equipamento está.
O operador pode movimentar o sector scaning para varrer uma determinada área, geralmente mais delimitada e restrita, como píers, pequenos lagos, abaixo de pontes etc.
Multibeam Sonar
Geralmente montados em ROV (Remote Operated Vehicle) ou levados na mão por mergulhadores.
Funciona como uma lanterna, que fornece imagens do local onde é apontado.
Não é possível marcar anomalias e alvos com esse equipamento, ele pode gravar as imagens, mas não permite a análise dos alvos.
Existem quatro fatores que devemos ter em mente para o ajuste do sonar.
- O alvo, o objeto que se está procurando;
- Ajuste da frequência utilizada pelo aparelho;
- Determinar o alcance do aparelho;
- Ajuste da profundidade que o side scan vai trabalhar.
Ajuste da frequência utilizada pelo aparelho
Para escolhermos a melhor frequência, devemos entender alguns conceitos:
Frequência é uma grandeza física que indica quantas vezes alguma coisa acontece em um período de tempo.
A frequência de um som é quantas vezes uma única vibração desse som ocorre em um segundo.
A quantidade de ciclos, ondas, ou oscilações por segundo é representado internacionalmente pela unidade de medida chamada Hertz (Hz).
Por exemplo, se um som produz 1.000 vibrações por segundo, sua frequência é de 1.000 Hz ou 1 KHz.
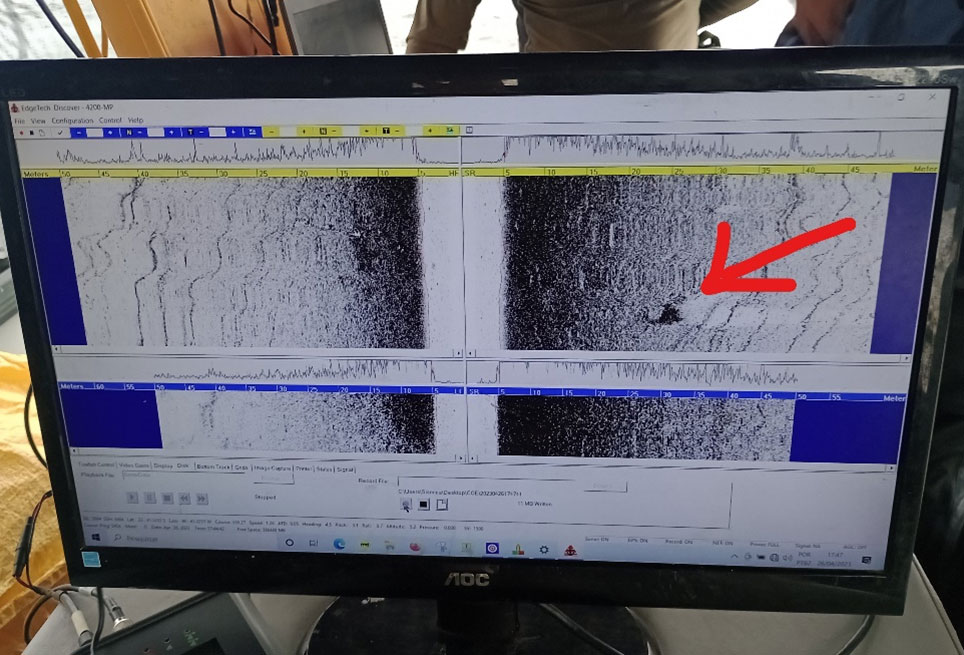
Mesmo utilizando um sonar de baixa frequência foi possível localizar um boneco no simulado, como é possível ver na parte direita superior do monitor acima.
Baixa frequências são utilizadas em buscas
São caracterizadas por ondas longas, que armazenam mais energia e conseguem ir mais longe, são indicadas para localização de anomalias. Mas não são capazes de dar detalhes, muitas vezes dois objetos próximos podem parecer um único objeto.
Altas frequências são utilizadas da identificação e detalhamento dos objetos
São caracterizadas por ondas curtas, que apesar de não armazenar tanta energia, conseguem penetrar em locais menores, dando mais detalhamento e resolução dos objetos.
Determinar o alcance do aparelho
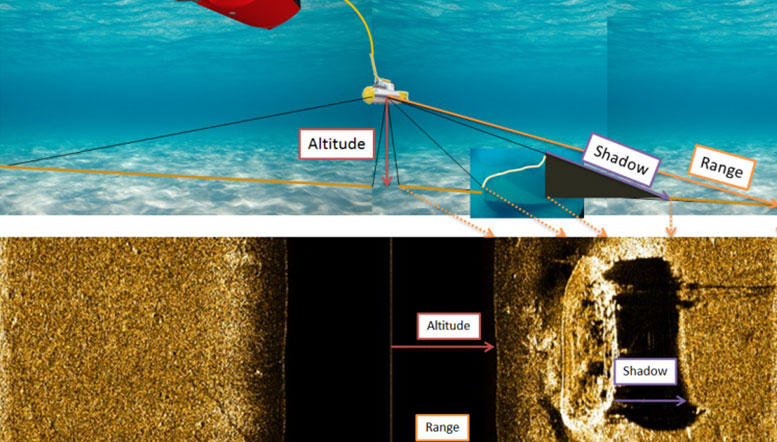
O alcance ou Range, do aparelho, é a distância que o sonar vai atingir de cada lado do equipamento (Towfish) ou simplesmente peixe, representado pela imagem na tela do computador.
O range de bombordo, somado com o range de estibordo gera uma imagem total chamada Swat.
Por exemplo, um alcance de 30 metros a bombordo, com 30 m a boreste, gera um swat de 60m.
De acordo com o objeto que procuramos, devemos ter em mente o quão grande ele vai aparecer na imagem do computador de acordo com a distância selecionada. Quanto maior a distância, menor aparecerá o objeto. Será que o operador conseguirá distinguir essa anomalia ?
Ajuste da profundidade que o side scan vai trabalhar
Esse é um dos fatores que os operadores mais erram durante as buscas. Muitas vezes por medo de enrosco os operadores deixam o peixe muito longe do fundo, ou buscando melhor resolução acabam deixando próximos demais do fundo. Ou quando utilizam um side scan montado no casco da embarcação, querem fazer buscas em locais muito fundos.
Não importa se o operador utiliza um side scan montado no casco, ou um peixe, a distância que esse side scan deve estar do fundo equivale a 10% do alcance que determinamos para a busca.
Limitações do Side Scan
Essas limitações se aplicam para os sonares em geral. Quanto mais o operador treinar e utilizar esse equipamento, mais ele conhecerá suas características, aplicações e limitações.
As principais limitações do equipamento side scan e varreduras no serviço de MSP são:
Experiência do Operador
Acredito que esse é o fator mais importante do conjunto, é melhor para o time ter um operador experiente e acostumado com a tecnologia e equipamento de side scan , mesmo que com um equipamento não tão avançado, do que termos o melhor e mais avançado equipamento, mas com um operador inexperiente.
Falha na escolha da frequência
Como já citado, a escolha da frequência está relacionada diretamente com o alvo a ser procurado, bem como a fase da busca em que o time se encontra, se na localização ou na identificação de particularidades da anomalia.
Profundidade errada do peixe
Quando falamos em profundidade do equipamento estamos na realidade pensando na distância e que o peixe se encontra do fundo, não importando o quanto ele está da superfície. A profundidade está diretamente vinculada ao alcance escolhido para a operação. Outro fator que pode causar o erro de distância do equipamento com o fundo seria a utilização de side scan montado em casco ou mesmo o tamanho do cabo disponível para o reboque, visto que alguns modelos possuem cabos com menos de 10 metros.
Falha na escolha do alcance
O alcance está relacionado com o quão grande o operador quer que o objeto apareça na tela do computador. Devendo ser grande o suficiente para a sua identificação, permitindo que uma área significativa seja varrida em cada passada.
Obstáculos
Obstáculos como vegetações, objetos à deriva, algas, lixos e irregularidades do fundo atrapalham o deslocamento do peixe, podendo causar-lhe danos ou enroscos.
Pixelização
tela do computador deve ter um tamanho e tecnologia suficientes para que o operador consiga interpretar todas as informações transmitidas pelo equipamento, diferenciando detalhes das anomalias, tanto em forma quanto em densidade, através do brilho. Muitas vezes é investido muito valor em um equipamento sonar de alta tecnologia, mas o laptop em que ele é conectado não consegue transmitir tudo o que o equipamento passa de informações no sonar.
A intenção desse artigo foi dar um panorama geral do treinamento realizado pelos mergulhadores do COE e da tecnologia de utilização de sonares para times de Mergulho de Segurança Pública, esse assunto é muito amplo para ser completamente abordado em um artigo, mas já indica um norte e esclarece alguns detalhes ao leigo nessa tecnologia.

Ronaldo Possato
Major da Polícia Militar do Estado de São Paulo - Batalhão de Operações Especiais.
• Comandante do Comandos e Operações Especiais (COE )do Batalhão de Operações Especiais de SP;
• PSD Program Director IANTD (International Association of Nitrox and Technical Divers);
• Instructor Trainer NAPD (National Academy of Police Diver)
• Instrutor PADI, SDI / TDI / ERDI e CMAS.
• Especialista em PSD (Hull Search, lifting, criminal scene, contaminated water e underwater cave recovery and rescue) e Mergulho Técnico (Misturas, CAVE e Rebreather);
• Coordenador regional da IUCRR (International Underwater Cave Rescue and Recovery) no Brasil.

